






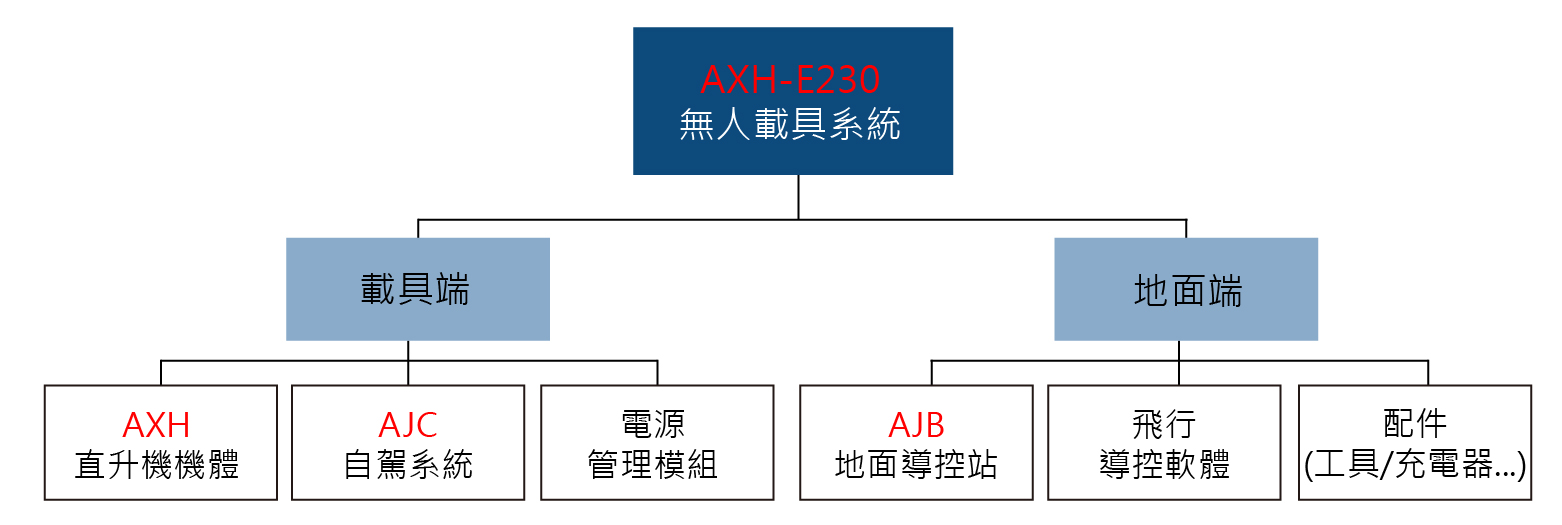
AXH-E230為一款專業型多功能無人直升機,採用4獎式高升力翼型主旋翼設計,並搭配高效率電動無刷動力系統,加上中置化大酬載空間配置使得AXH-E230具有高機動性、多用途、大酬載、低噪音、長滯空等特點。
AXH-E230在全系統基本配置上,載具端除了機體本身外,並搭載內建無線數位通訊模組的高智能自動駕駛系統AJC,以及高規格的電源管理模組,執行完全自主智能導航飛行任務。
地面端則配備了同時內建無線通訊模組的高效能地面控制站AJB,搭配專屬的地面飛行導控軟體,與載具端配合執行及時監控與控制。

 [/tab][tab title=”規格”]
[/tab][tab title=”規格”]
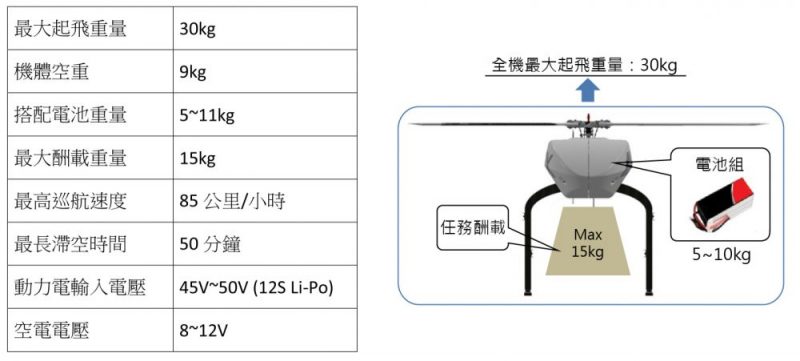
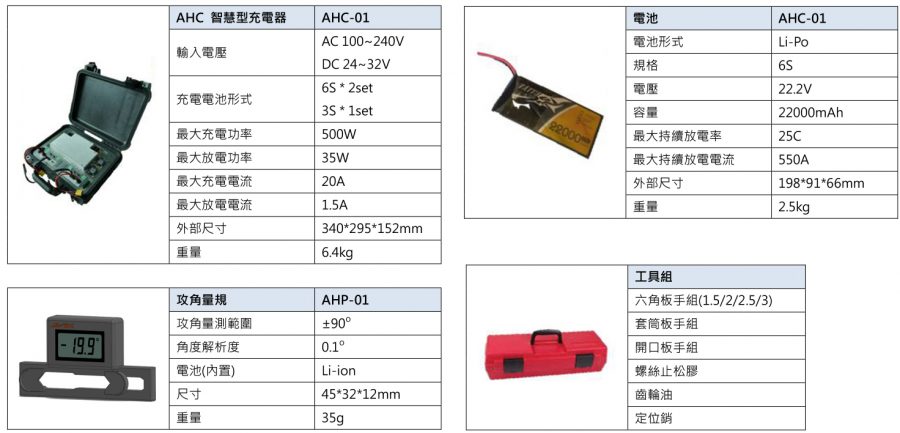
基本飛行規格
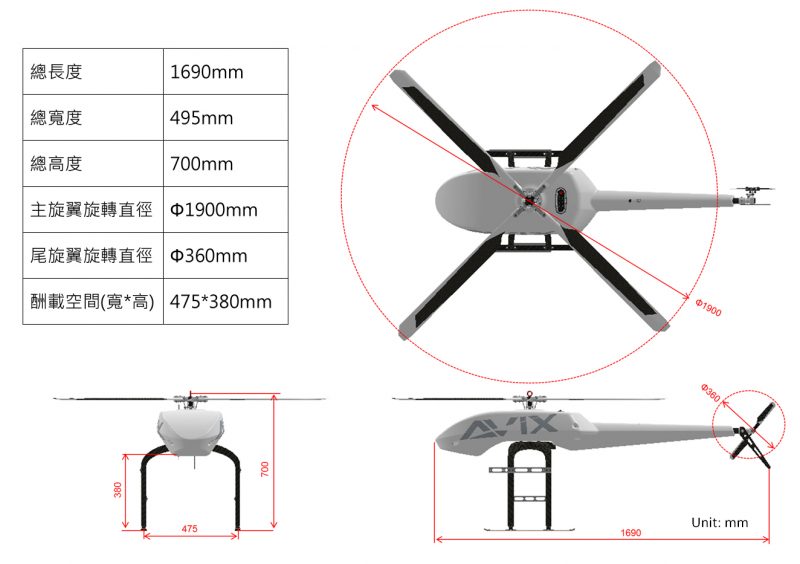
載具基本尺寸規格
自動駕駛系統規格

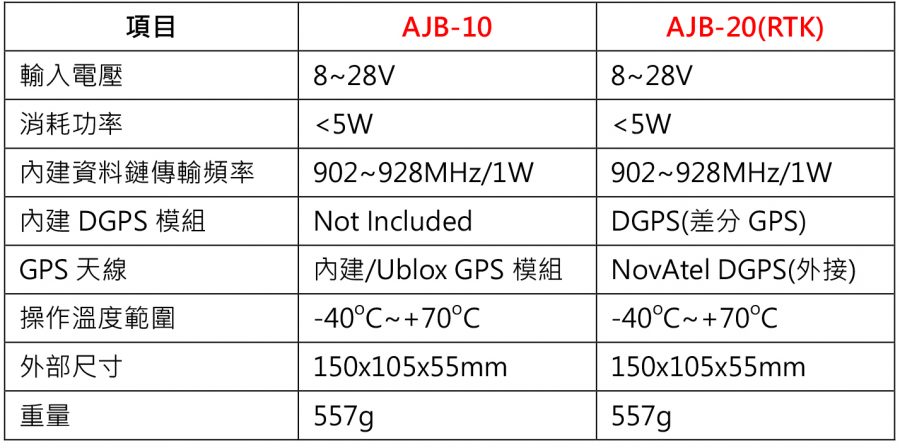
地面站系統規格
配件系統規格
 [/tab][tab title=”特點”]
[/tab][tab title=”特點”]
機體

為了配合各種不同應用層面所搭載各式樣酬載的安裝,AXH-E230在機體中心下方之高強度碳纖維腳架結構上,設計超大酬載空間與安裝介面,彈性大機動性高。
旋翼頭採用4組主旋翼配置設計,搭配高升力翼型、高強度碳纖維材質之螺旋槳,在低轉速下足以提供AXH-E230全載具系統足夠升力及靈活之操控性。
在機體姿態控制上,主旋翼舵面的控制由全金屬高精度十字盤連桿機構搭配三個全金屬高扭力數位伺服舵機進行。尾舵控制亦搭配一全金屬高速尾舵伺服機輔助航向姿態控制。
矩陣式輕量化之碳纖維與高強度鋁合金方管主機體結構,易於組裝與維修。在電池的安裝上也容易固定與拆卸,在搭配不同構型的電池上也具有非常大的彈性。
直驅式箱型齒輪傳動機構設計,搭配最佳化齒輪比設計,使動力馬達與主旋翼/尾旋翼驅動搭配上傳遞最佳效率。
密封式齒輪箱除了具有極佳密封防塵效果外,在組裝與保養維修上,翼大大提高便利性、安全性與可靠度。
電源控制系統除了針對動力電源以及空電電源進行有效的配送外,在啟動前執行關鍵電力系統的偵測,安全且直接的以LED燈號顯示方式於控制面板上提供完整的電源訊息。
電源控制盒內部除了電源管理模組外,亦內建高附載動力馬達速度控制模組,針對電動動力作有效的配置與監控。
自動駕駛系統

高智能自動駕駛系統AJC,基本演算邏輯採用最先進的類神經網路(Neutral Network)與自適(adaptive)控制演算邏輯,執行SINS慣性自主導航控制,並結合高精度GPS輔助校正,使長時間自主導航飛行精度可達到公尺(m)級的控制精度(SINS/GPS)。如搭配RTK實時差分GPS系統,則可達到釐米(cm)級的控制精度。
AJC內置的感測元件集成了高精度六個自由度微機電慣性傳感器(MENS Sensor)、三軸磁羅盤、(靜)壓力傳感器以及高敏度的GPS接收機進行相關資料(raw data)採集,所採集的資料採用無跡卡爾曼率波(UKF/unscented Kalman filter)演算法處理,穩定性好、收斂快速。不需進行繁瑣費時初始校正便可生成穩定高精確度的姿態於航向資訊(AHRS),進行姿態控制。
在安全失效模式設定上,有許多模式可以設定如自動返航、原位停旋…等。當失掉GPS訊號時,無法輔助SINS進行校正,GPS/SINS演算法會自動切換為AD/AHRS模式進行演算控制,10分鐘內自主飛行的定位精度誤差可控制在1Km內。
AJC同時整合1W/900Mhz雙向跳頻無線傳輸模組,通訊距離可達30Km~60Km。
AJB地面導控站
AJB為一款高效能地面導控站,內建數位傳輸模組(標準900MHz),在飛行任務執行過程中能與載具端的自動駕駛系統維持即時的數位資料傳輸。
AJB配置靈活、擴充性大,可內置差分GPS模組,同時與內置差分GPS模組的自動駕駛系統搭配,可進行實時動態定位(RTK)演算,達到釐米級的控制精度。
另外地面導控站軟體經由電腦操作介面,透過AJB地面站的無線傳輸資料鏈路,與載具端的自駕系統連接,可執行飛行前任務規劃並上載,任務執行過程中的及時操控與監控,以及任務執行後的飛行資料回撥等功能。

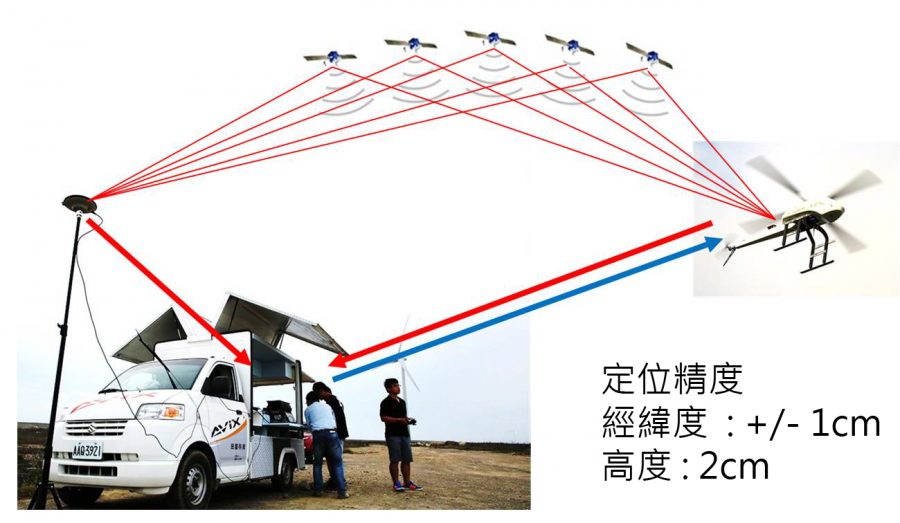
實時動態定位 RTK
AJC-20自駕系統特別集成了Novatel高精度實時差分GPS 接收機,透過內建的資料鏈路與同時整合DGPS的地面站AJB-20進行即時資料比對與差分演算,而得到釐米級(cm) 的經緯度及高度定位精度。搭配RTK系統,因高度定位的精準, AXH-E230便可執行自動起飛降落的飛行模式。
 [/tab][tab title=”應用”]
[/tab][tab title=”應用”]
AXH–E230 中置化超大型與模組化安裝介面的酬載空間設計,可搭配合多種應用型功能酬載,如高畫質攝影鏡頭、熱顯像儀、高精度測繪相機、雷射掃描儀、幅射偵測儀、高光譜儀..等。分別應用在偵查、監控、測繪、遙測、電影拍攝、農/林/漁業調查、 油/礦業…等各種領域應用上。
 [/tab][tab title=”構型”]
[/tab][tab title=”構型”]
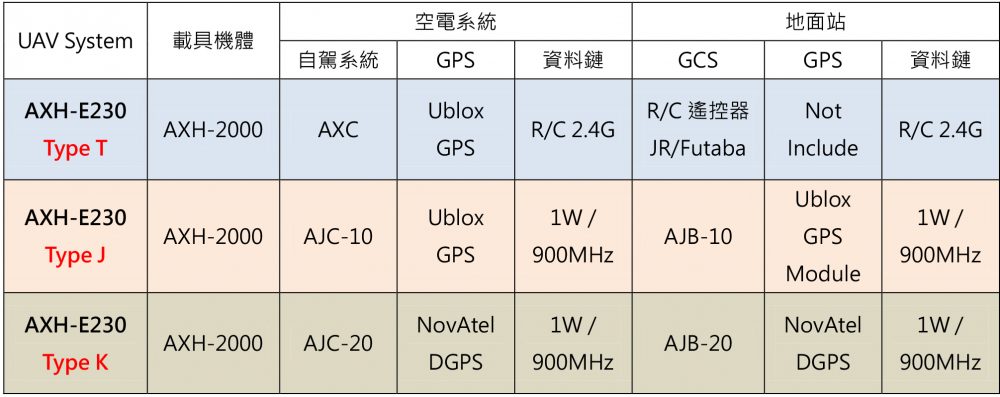
構型與配備RTK
配合不同應用與操作的需求,AXH-E230共整合成三種系統構型。


 [/tab][/tabs]
[/tab][/tabs]